




Stringman Pilot Anchors w/ Arpeggio Gripper
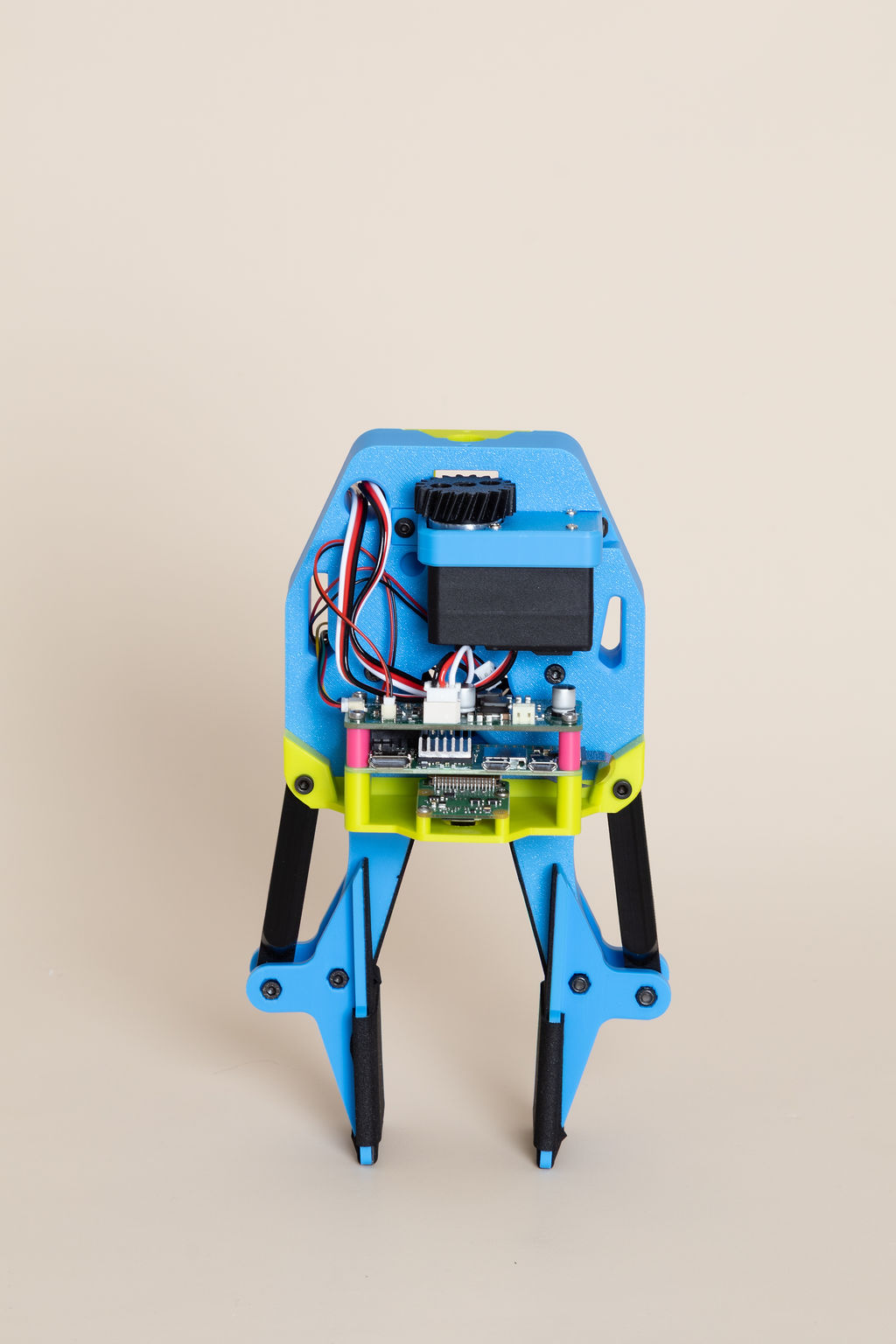
An automatic decluttering system, hung from anchors mounted in the corners of your ceiling and controlled by self-hosted AI or gamepad. 'Arpeggio' is the second hardware version of Stringman. This product contains the Arpeggio gripper based on the ST3215 motors featuring a wrist joint, coupled with the original Pilot anchors based on Nema 17 motors.
Ships in 5-8 days to the United States or Canada
Stringman: A Room-Scale Cable Robot
Stringman is a ceiling-mounted, cable-driven parallel robot (CDPR) designed to enable room-scale manipulation without the constraint of an arm clamped to a desk or the cost of humanoid navigation.
By utilizing a four-anchor overhead architecture, Stringman remains entirely off the floor, offering a unique sandbox for Imitation Learning (IL), Teleoperation, and Home Automation experimentation on more than just desk toys. The work area can be an entire room.
Why the ceiling? Avoiding the floor means avoiding navigation, so you can focus on higher-level tasks and start automating the organization of objects in the room while keeping it low cost.
The Platform
Stringman is an open source hardware platform and software stack. It is designed to be an affordable, extensible entry point for domestic robotics.
- Kinematics: 4-wire suspended motion system. 2-dof gripper.
- Payload: 750 g dynamic lifting capacity (specific capacity depends on end effector speed and altitude.)
- Workspace: Full rectangular room coverage; docks at ceiling height when idle.
- Compute: External. Robot components run on Raspberry Pi Zero 2Ws streaming video to a host machine running the motion controller.
Technical Specifications
| Feature | Specification |
|---|---|
| Vision System | 5-Camera Array (4× Anchors, 1× End-Effector) for global localization and target identification. |
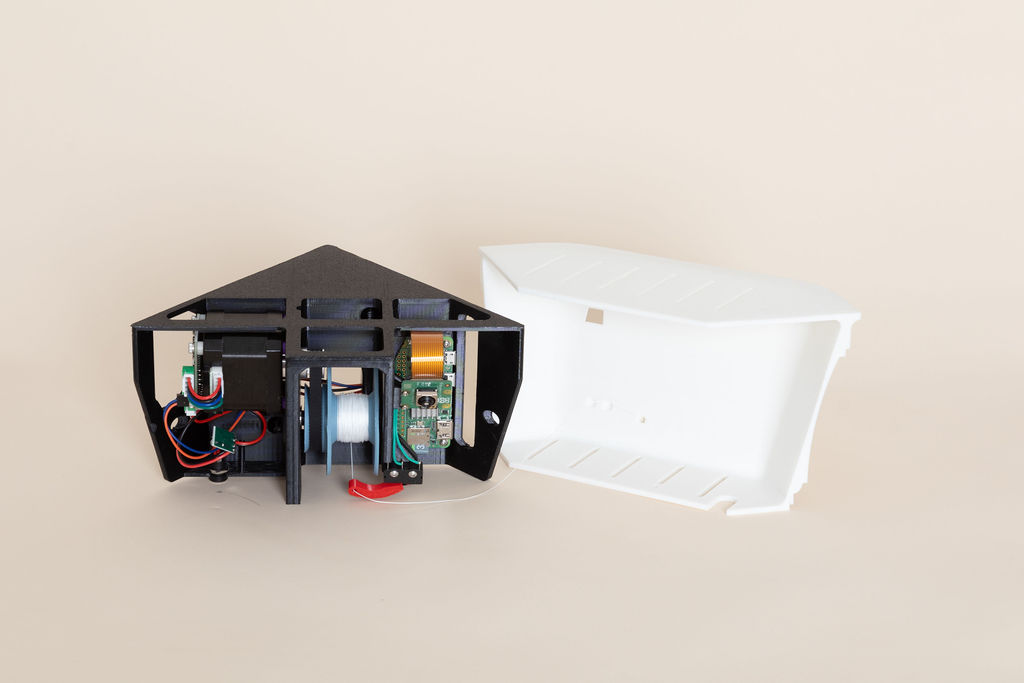
| End-Effector | Two-fingered servo gripper with integrated finger pressure sensor, IMU, and laser rangefinder. |
| Anchors | 4× NEMA 17 Stepper Motors with Makerbase MKS42C controllers, housed in "crown-molding" style enclosures. |
| Power | Each component powered independently with 24V from the nearest outlet. Continuous tethered power (24V) to the gripper via one of the support lines. |
| Safety | Independent wireless hardware E-Stop to instantly kill power to all modules. |
Control & Intelligence
Stringman is built for experimentation. The Stringman motion controller is the brain of the robot, running headless on a host machine. The robot can be controlled by connecting to its protobuf-based telemetry server. Two UIs are available for 3D visualization of the workspace, tension monitoring, and automatic calibration. One is a LAN-only local application, and a web-based control panel uses Neufangled Robotics' servers to allow secure access to your robot from anywhere.
Stringman currently utilizes a custom control stack in which a model for identifying targets, a model for centering the gripper, and a procedure for target-pick-and-place are combined for a pseudo-intelligent laundry pickup behavior out of the box.
- Intuitive Teleop: Use a gamepad to navigate the room. The system handles the complex inverse kinematics of the four-cable system for you.
- Custom control: The
nf_robotPython module makes it easy to hook into the robot's state and write your own high-level behaviors. - The Roadmap: We are actively working to re-integrate LeRobot support. The goal is to allow users to once again record datasets for ACT and Diffusion policies using our new, lower latency telemetry protocol.
Pilot Launch Disclosure
This is a Pilot Launch. Both hardware and software are in active development. We are looking for "pioneer" users who want to try a new robot, share datasets, and provide feedback that will help us eventually create a fully autonomous household utility.
Note: The current "out of the box" autonomous behavior is to pick up laundry and drop it into the hamper with a hybrid approach. This platform is for those who are ok with trying something that may not always work, downloading the latest updates and trying things again, or training models themselves.
This listing is for a fully assembled Stringman consisting of several components, ready to mount on the wall. Build kits are also available if you want to print and assemble it.
System Requirements
- Host PC: A dedicated machine (Ubuntu Linux recommended) with 6+ cores. All image processing occurs here. GPU accelerated inference is ideal, but the CPU fallback is still workable at 1 Hz since neither target nor camera are moving in this unique design.
- Environment: Consistent and strong indoor lighting in the work area is needed to maintain high precision.
Appearance and Livability
- Parked out of reach: The support lines remain connected when powered off and hang taut across the ceiling of the room. They are thin and very hard to see from a distance, and out of reach when parked. They can be disconnected using fishing "speed clips" if needed.
- Crown moulding look: The spool anchors have a decorative cover that looks like white crown moulding to blend in. They are intended to be mounted to studs with wood screws. If removed, holes would need to be spackled and painted.
- Gripper customization: The gripper face shell is shipped in copper silk PLA but is easy to reprint in any color you like. STLs are provided on the downloads page.
Early Adopter Perks
Legacy Discount: All Pilot Launch supporters receive a permanent 10% discount on all future Neufangled Robotics hardware.