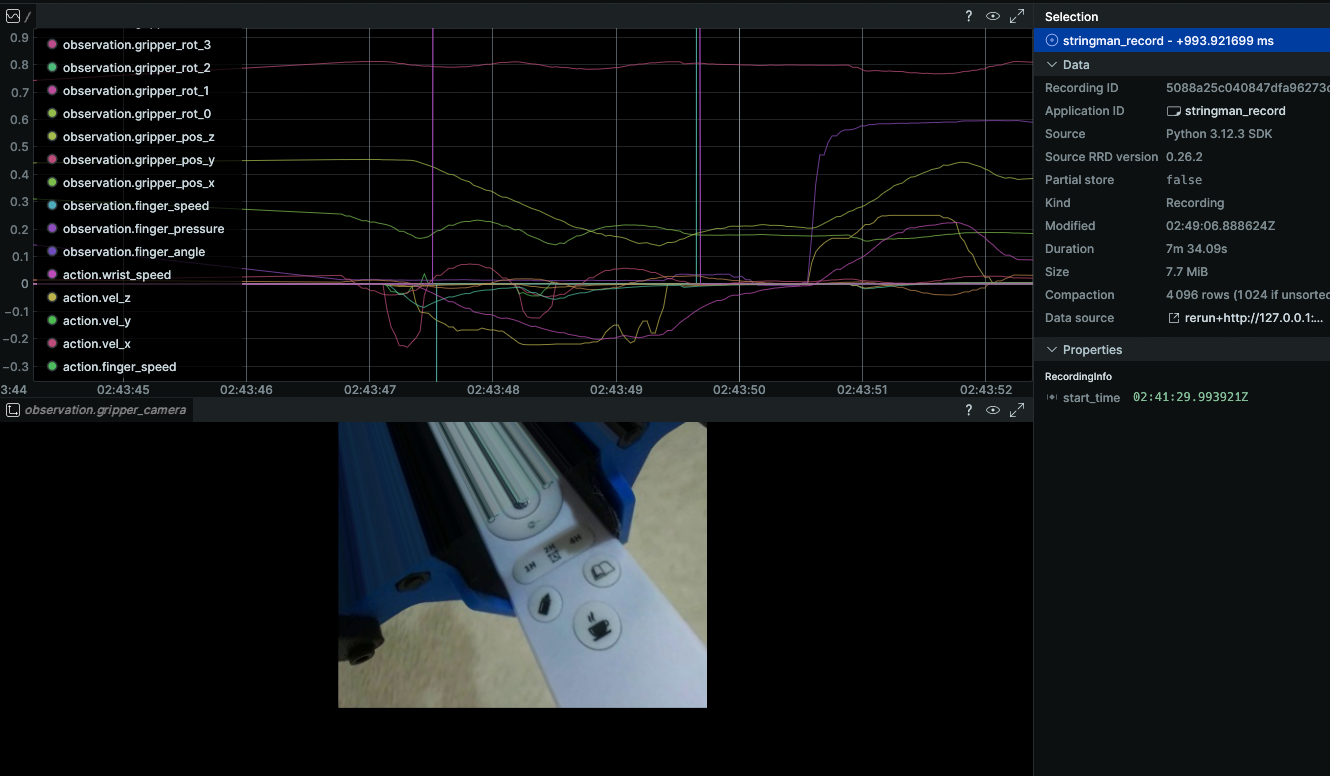
LeRobot Integration
We've built our grasping capabilities on top of the LeRobot platform, which allows us to train Stringman to immitate grasping examples from teleoperation. We provide a detailed guide inviting you to try training it to grasp objects from your own examples. Robotic Immitation Learning is not as hard as it looks.
Unmatched Reach
Unlike desktop arms limited to a fixed radius, Stringman leverages a cable-driven architecture to access the full volume of a room. By mounting anchors in the corners, the gripper can transition from floor-level pick-ups to high-shelf placements without rails or limbs, all with fewer actuators than even the simplest mobile robots.
Set Your Drop Bins
Organizing your home is a physical process, not a coding task. Use our clip-on fiducial tags to designate your laundry bin, toy box, and trash can. Stringman maps these locations visually. You don't need to tag individual pieces of clutter—just the destination. If there's something you never want it to pick up, you can mark that item as off-limits.
Stringman's AI produces a list of targets for pick up, and you can add or remove any target from the UI. If you want, you can disable the inference altogether and just click on all the things in the image you'd like it to grab and haul off to the trash can.
Frequently Asked Questions
How difficult is the physical installation?
Stringman's anchors are secured to the studs with a pair of wood screws, similar to a curtain rod. You need step ladder, a cordless drill, and about 1 hour for installation and setup following the detailed picture guides. Connecting to your network is a matter of holding wifi sharing QR codes up to stringman's cameras. Calibration is automatic and takes about 30 seconds.
Will there be lines crossing my room?
As long as it remains installed, yes. However, when parked, they are up near the ceiling and out of the way. And if you regulary run stringman, your room will be less cluttered than it started. A future version of the anchor however will make some improvments in this regard, being easier to detach and remove for events, while leaving a small clip instead of holes.
Can it be used in rooms with ceiling fans?
Yes, it's just a matter of mounting the anchors at or below the level of the fan, making it physically impossible for the lines or marker box to touch it. Similarly, the work area can be shrunk to exlcude low hanging light fixures if they are off to the side, but if the center of the room does contain low hanging objects, strinman cannot be installed in that room.

Local Privacy
Robotics shouldn't come at the cost of domestic privacy. Stringman supports a fully on-premise operating mode where all video processing and telemetry remain within your local network. You get the full suite of automation and computer vision functionality without streaming your home's interior to the cloud.
Remote Management
For those who prefer to make the trade-off by binding their robot to an account, our web-based console allows you to monitor and control Stringman from anywhere. Think of it as a security camera that can actually interact with its environment—log in from work to move an object or check a status from your phone.
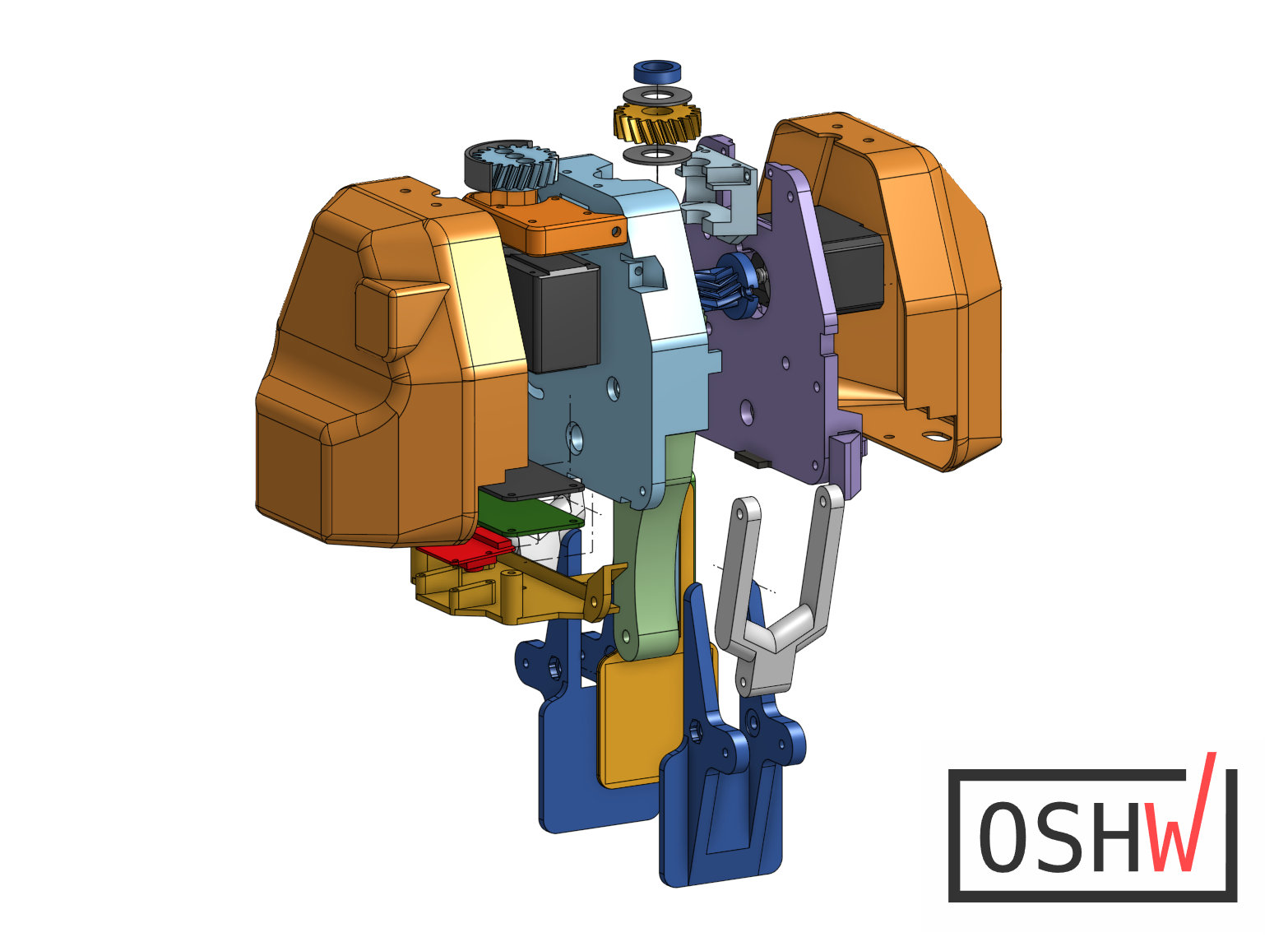
Open Source
Stringman is proudly based on a stack of open source tools and is Apache 2.0 licensed and OSHWA certified. From the mechanical CAD to the firmware running on the Raspberry Pi nodes, the entire stack is available for audit, modification, and community contribution. Build something useful, and pay it forward.
Start at the build guides to get an idea of whether you'd like to print and build one yourself
No Charging Downtime
Mobile robots spend a significant portion of their time charging. Because Stringman is a powered from the wall, it's always ready for work. Furthermore, by removing the heavy battery pack, we've increased the payload capacity per dollar compared to mobile platforms that must waste energy carrying their own power supply.

Household Aesthetics
We designed Stringman to exist in a home, not just a lab. The corner anchors are styled to mimic standard crown moulding, and the high-strength fishing line used for the drive system is nearly invisible at a distance of just a few meters. It’s an appliance that blends in when not in use.
Swing Cancellation
Stringman's gripper is 50cm below the pivot point so it can reach the floor next to beds and tables. This additional linkage could allow unconstrained motion so Stringman employs active swing cancellation algorithms to counteract momentum, without adding the cost of any additional motors. This ensures the gripper remains steady and predictable even during rapid cross-room traversals.
There's a whole video about swing cancellation if you're curious about how it works!
Wrist and Fingers
Often, a simple solution that gets the job done has more value than a complex one. Stringman uses a two fingered gripper with a wrist. This is enough dexterity for the clutter it is designed to pick up, keeping weight and cost low and reliability high. In our household tests we have determined that more layers of grip tape is simply a better return on investment than more articulated fingers.
Customize Your Look
The hardware is as modular as the software. The Stringman faceplate is easily swappable and 3D printable. Change colors to match your decor, or use our templates to design something entirely custom. If you want your robot to look like a pineapple, the files are there for you to do it.
